1、激光雷达的工作原理
激光雷达测量光脉冲的飞行时间,以便能够分辨传感器和物体之间的距离。想象一下,当光脉冲发射时启动秒表,然后在光脉冲返回时停止计时器(从它遇到的第一个物体反射)。通过测量激光的“飞行时间”,并知道脉冲传播的速度,可以解决距离问题。光以每秒300亿米(每秒186,000英里)的速度传播,因此需要非常高精度的设备才能生成有关距离的数据。
为了产生完整的点云,传感器必须能够非常快速地对整个环境进行采样。激光雷达做到这一点的一种方法是在单个发射器/接收器上使用非常高的采样率。每一个每秒发射数万或数十万个激光脉冲。这意味着,在 1 秒内,多达 100,000 个激光脉冲完成从激光雷达单元上的发射器到被测物体的往返行程,然后返回激光雷达单元上的接收器,靠近发射器。大型系统有多达64个这样的发射器/接收器对或“通道”。多个通道使系统每秒生成超过一百万个数据点。
然而,64个固定通道不足以映射整个环境,它只会在非常集中的区域提供非常清晰的分辨率。由于光学器件需要精度,制造更多这些通道的成本很高,因此将通道数量增加到 64 以上只会更快地增加成本。相反,许多激光雷达系统使用旋转组件或旋转镜,使通道能够360度扫视环境。常见的策略包括将每个发射器和接收器倾斜到水平以上或以下,以覆盖激光视野中的更多环境。例如,杜尼智能清洁机器S660就是通过激光雷达系统具有26.8垂直视野(旋转使其具有360水平视野)。
2、激光雷达的应用
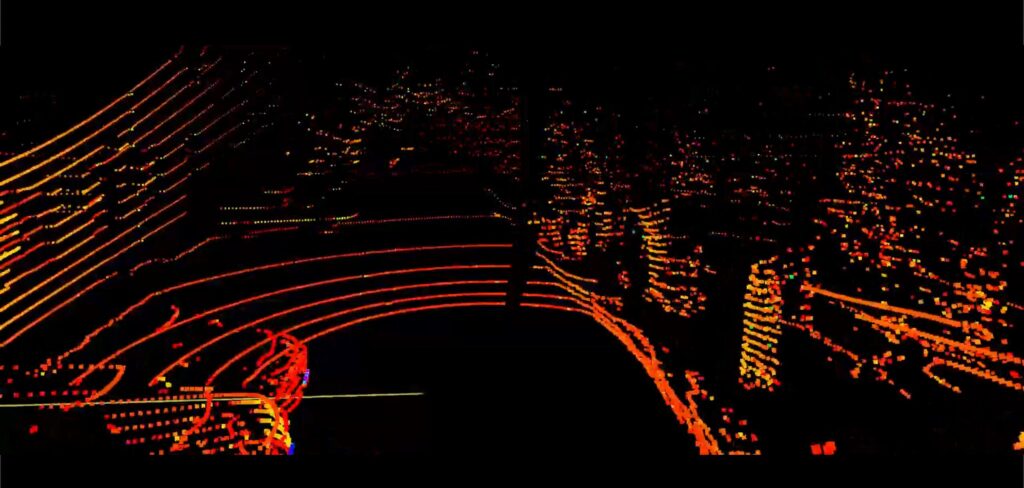
点云可用于再现景观或环境的 3D 模型。一些应用包括:
- 地质测绘/成像以监测侵蚀或其他变化
- 监测植物和树木的生长
- 为建设项目做测量工作
- 对垃圾填埋场进行准确的体积估算
3、激光雷达的挑战
由于激光雷达基于测量激光脉冲返回传感器所需的时间,因此高反射表面会带来问题。大多数材料在微观水平上具有粗糙的表面,并向各个方向散射光。这种散射光的一小部分会回到传感器,足以生成距离数据。但是,如果表面反射率很高,则光线会相干地反射远离传感器,并且该区域的点云不完整。

